Кинематический синтез прямолинейно – огибающего механизма щековой дробилки
Аннотация
Представлен кинематический синтез неизвестных параметров исполнительного прямолинейно-огибающего механизма щековой дробилки, которые связаны зависимостями с известными параметрами камеры дробления, разгрузочной и загрузочной щели. Зависимости получены на основе метода интерполяционного приближения функции. Представлено описание щековой дробилки со сложным огибающим движением исполнительного органа, ее достоинства и область применения.
Ключевые слова: прямолинейно-огибающий механизм, кинематический синтез, щековая дробилка.Ключевые слова:
Повышение уровня экологической безопасности в сочетании с расширяющимся ассортиментом стеклянных изделий, в частности, стеклотары, требует нового подхода к их утилизации – через предварительное измельчение, которое облегчает транспортировку стеклобоя к потребителю. В странах Евросоюза эта задача решается при помощи компактного дробильного оборудования, которое устанавливается в подсобных помещениях учреждений, торговых центров, гостиниц и т.д. Опыт их эксплуатации позволяет сформулировать комплекс требований, предъявляемый к дробилкам нового поколения: они должны быть компактны, малошумны, безопасны и энергоэффективны. Кроме того, потребитель измельченного сырья заинтересован в однородности получаемой фракции по размерам осколков.
Перспективным решением в контексте заявленных требований представляется использование в качестве исполнительного механизма щековой дробилки прямолинейно-огибающего механизма на базе кривошипно-кулисного привода [1]. Такой выбор обусловлен двумя факторами:
- незначительными требованиями к точности огибания и
- значительным углом рабочего хода для данной схемы, превышающим 180o
Указанные факторы позволяют применить к данной схеме интерполяционный метод синтеза по трем точкам, что соответствует промежуточному приближению, так как симметричная шатунная кривая кривошипно-кулисного механизма является кривой шестого порядка. В случае промежуточного приближения приравниваются абсциссы направляющей точки М в среднем положении (при φ1=0) и в крайнем положении, соответствующем концу интервала приближения (для кривошипно-ползунного механизма с шатунной кривой четвертого порядка такое приближение соответствует наилучшему) [3].
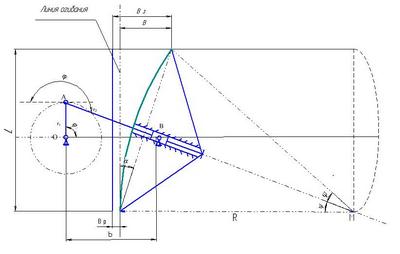
Рис. 1 - Прямолинейно-огибающий механизм щековой дробилки со сложным движением щеки
На рисунке 1 представлен прямолинейно-огибающий механизм щековой дробилки, который характеризуется следующими параметрами рабочего пространства – камеры дробления: ![]() - угол раскрытия рабочего органа,
- угол раскрытия рабочего органа, ![]() – ширина загрузочной щели,
– ширина загрузочной щели, ![]() – ширина разгрузочной щели,
– ширина разгрузочной щели, ![]() – высота камеры дробления, соответствующая длине интервала приближения.
– высота камеры дробления, соответствующая длине интервала приближения.
Кинематический синтез параметров прямолинейно-огибающего механизма дробилки требует определения неизвестных параметров: длины кривошипа ![]() , расстояния между точкой сочленения кривошипа и шатуна и направляющей точкой
, расстояния между точкой сочленения кривошипа и шатуна и направляющей точкой ![]() , длины шатуна
, длины шатуна ![]() , радиуса кривизны дуги
, радиуса кривизны дуги ![]() , образующего поверхность подвижной щеки и длину дуги
, образующего поверхность подвижной щеки и длину дуги ![]() подвижной выпуклой щеки из условия промежуточного приближения при заданных параметрах
подвижной выпуклой щеки из условия промежуточного приближения при заданных параметрах ![]() ,
, ![]() ,
, ![]() ,
, ![]() . [2].
. [2].
Угол раскрытия рабочего органа щековой дробилки (рис.1):
![]() , где
, где ![]() (1)
(1)
Ширина ![]() загрузочной щели камеры дробления задается от размеров принимаемой на переработку стеклотары (стеклобоя), а ширина
загрузочной щели камеры дробления задается от размеров принимаемой на переработку стеклотары (стеклобоя), а ширина ![]() разгрузочной щели соответствует размерам получаемой фракции стеклобоя после переработки.
разгрузочной щели соответствует размерам получаемой фракции стеклобоя после переработки.
Условие равенства абсцисс направляющей точки М в середине и конце интервала приближения можно выразить в виде:
![]() ;
;
где ![]() =π - угол поворота кривошипа, соответствующий середине интервала приближения,
=π - угол поворота кривошипа, соответствующий середине интервала приближения,
![]() =2π - значение функции положения шатунной плоскости в середине интервала приближения при
=2π - значение функции положения шатунной плоскости в середине интервала приближения при ![]() ;
;
![]() =π/2 - угол поворота кривошипа, соответствующий концу интервала приближения;
=π/2 - угол поворота кривошипа, соответствующий концу интервала приближения;
![]() =2π-ψ - функция положения шатунной плоскости в конце интервала приближения.
=2π-ψ - функция положения шатунной плоскости в конце интервала приближения.
С учетом функции положения шатунной плоскости ![]() имеем:
имеем:
![]() (2)
(2)
Преобразовав уравнение (2) выразим параметр ![]() :
:
![]() . (3)
. (3)
Длину прямолинейного участка траектории движения точки М или высоту камеры дробления можно представить в виде:
![]() ,
,
Поскольку ![]() задается с учетом габаритной высоты устройства и является известным, можно найти
задается с учетом габаритной высоты устройства и является известным, можно найти ![]() с учетом
с учетом ![]() и функции поворота шатунной плоскости
и функции поворота шатунной плоскости ![]() :
:
![]() (4)
(4)
По теореме синусов из треугольникаOАВ составим соотношение:
![]() ,
,
отсюда длина стойки ![]() , (5)
, (5)
Движение «огибание» рабочим органом не должно сопровождаться скольжением ![]() между прямой и огибаемой дугой окружности, то есть между выпуклой поверхностью подвижной щеки и прямолинейной поверхностью неподвижной щеки дробилки. Это позволяет избежать возникновения сил трения в пятне контакта, обеспечить стойкость инструмента и одномерность получаемой фракции продуктов дробления. Скольжение равно нулю, если разность между перемещением точки М на расстояние L и перемещением огибающей дуги длиной l за это же время равна нулю:
между прямой и огибаемой дугой окружности, то есть между выпуклой поверхностью подвижной щеки и прямолинейной поверхностью неподвижной щеки дробилки. Это позволяет избежать возникновения сил трения в пятне контакта, обеспечить стойкость инструмента и одномерность получаемой фракции продуктов дробления. Скольжение равно нулю, если разность между перемещением точки М на расстояние L и перемещением огибающей дуги длиной l за это же время равна нулю:
![]()
где ![]() - длина дуги, образующей поверхность рабочего органа, которая рассчитывается по формуле:
- длина дуги, образующей поверхность рабочего органа, которая рассчитывается по формуле:
![]() (6)
(6)
Подставив функции для L иl в уравнение (6), определим радиус дуги окружности при условии нулевого суммарного скольжения:
![]() ,
,
отсюда ![]() . (7)
. (7)
Таким образом, решая последовательно уравнения (1),(3),(4),(5),(6),(7), определяем кинематические параметры механизма дробилки, исходя из заданных геометрических размеров камеры дробления щековой дробилки.
Литература
-
1.А.С. 1646596 СССР, МКИ3 В02С 1/02. Лабораторная щековая дробилка [Текст] / А.Н. Дровников, С.А. Кузнецов, Г.Г Демиденко, Е.Б. Кузнецова. - № 4440074/33 ; заявл. 18.04.88 ; опубл. 07.05.91, Бюл. № 17. – 4 с. : ил.
2.Кузнецов С.А. Прямолинейно-огибающие механизмы. Анализ и синтез: монография. [Текст] / С.А. Кузнецов, А.В. Владимиров. – Шахты: Изд-во ЮРГУЭС, 2007. – 139 с.