Математическая модель и метод классификации технического состояния высоковольтных мехатронных модулей
Аннотация
Дата поступления статьи: 24.03.2014Представлены модель и метод классификации технического состояния высоковольтных мехатронных модулей движения, позволяющий по результатам контроля электроразрядной активности и скреднеквадратического значения виброскорости, отнести текущее состояние объекта к одному из классов диагнозов
Ключевые слова: Высоковольтный мехатронный модуль,нечеткая модель клоаасификации технического состояния, электроразрядная активность, среднеквадратическое значние виброскорости
05.13.05 - Элементы и устройства вычислительной техники и систем управления
05.13.18 - Математическое моделирование, численные методы и комплексы программ
Высоковольтные мехатронные модули являются важным звеном энергоснабжения и энергопотребления страны, что накладывает особые требования к их надежности и эффективности функционирования. Эксплуатация находящихся в неудовлетворительном техническом состоянии мехатронных модулей движения приводит как к прямым финансовым потерям, связанным с непрогнозируемым выходом из строя оборудования и вызванным этим нарушением технологического процесса, так и к значительным косвенным непродуктивным затратам электроэнергии, обусловленным повышенным электропотреблением при той же полезной мощности. Поэтому актуальной является проблема обеспечения надежного и эффективного функционирования мехатронных модулей. Одним из способов решения данной является контроль текущего технического состояния применением методов и средств диагностирования.
В области диагностирования элементов мехатронных модулей достигнут определенный успех [1, 2], однако известные работы носят разрозненный характер и не приспособлены к современному уровню развития мехатронных объектов. Нерешенной задачей остается разработка моделей, методов и средств, позволяющих осуществлять комплексную многопараметрическую диагностику технического состояния высоковольтных мехатронных модулей движения, позволяющих с высокой степенью достоверности определить текущее состояние объекта.
Разработка модели классификации сопряжена с необходимостью использования качественной неформализованной информации. Решить эту задачу позволяет применения нечеткой логики. Анализ существующих методов диагностирования показал целесообразность использования методов функционального диагностирования в процессе эксплуатации объекта. Структурный анализ основных видов высоковольтных мехатронных модулей показал наличие электрических и механических элементов. Для решения задачи классификации технического состояния, наиболее применимы методы электроразрядной (ЭРА) и вибрации. Контроль параметров ЭРА позволяет выявить электрические дефекты в цепях питания электродвигателя, статорной обмотке, пакетах активной части, цепях питания ротора, щеточно-контактном аппарате, контактных соединений в клеммной коробке [3 - 6]. Диагностика модуля по вибрации позволяет идентифицировать дефекты механического характера (ГОСТ Р ИСО 18436-2-2005). Совместное применение двух этих методов позволит осуществить комплексную оценку технического состояния двигателя и отнести его к одному из классов состояний.
В настоящее время существует большое разнообразие конструктивных исполнений высоковольтных мехатронных модулей, что обуславливает необходимость использования различной измерительной аппаратуры и существенно затрудняет накопление статистических данных и не позволяет обобщать результаты с целью получения граничных критериев. Решить данную проблему можно применением качественного подхода к оценке технического состояния с разбиением текущих состояний на некоторые условные зоны.
Наиболее удобный способ идентификации технического состояния механических частей электродвигателя – среднеквадратическое значение виброскорости (СКЗ) (ГОСТ Р ИСО 18436-2-2005, ГОСТ ИСО 10816-1-97).
По этому параметру, состояния модулей движения поделены на следующие зоны:
Зона А —новые машины, только что введенные в эксплуатацию.
Зона В — Машины пригодные для дальнейшей эксплуатации без ограничения сроков.
Зона С — Машины непригодные для длительной непрерывной эксплуатации.
Зона D— Критический уровень вибрации, способный вызвать повреждение машины
В зависимости от условий эксплуатации и можности,все электродвигатели разлеляются на нижеперечисленные четыре класса (ГОСТ ИСО 10816-1-97).
Класс 1 — Отдельные части двигателей и машин, соединенные с агрегатом и работающие в обычном для них режиме (серийные электрические моторы мощностью до 15 кВт являются типичными машинами этой категории).
Класс 2 — Машины средней величины (типовые электромоторы мощностью от 15 до 875 кВт) без специальных фундаментов, жестко установленные двигатели или машины (до 300 кВт) на специальных фундаментах.
Класс 3 — Мощные первичные двигатели и другие мощные машины с вращающимися массами, установленные на массивных фундаментах, относительно жестких в направлении измерения вибрации.
Класс 4 — Мощные первичные двигатели и другие мощные машины с вращающимися массами, установленные на фундаменты, относительно податливые в направлении измерения вибрации (например, турбогенераторы и газовые турбины с выходной мощностью более 10 МВт).
Примерные границы зон СКЗ виброскорости для машин различных классов приведены в табл. 1
Таблица 2
Примерные границы зон вибрации для машин различных классов
vrms, мм/с |
Класс 1 |
Класс 2 |
Класс 3 |
Класс 4 |
|
0.28 |
А |
A |
A |
A |
|
0.45 |
|
|
|
|
|
0.71 |
|
|
|
|
|
1.12 |
B |
|
|
|
|
1.8 |
|
B |
|
|
|
2.8 |
С |
|
B |
|
|
4.5 |
|
C |
|
B |
|
7.1 |
D |
|
C |
|
|
11.2 |
|
D |
|
C |
|
18 |
|
|
D |
|
|
28 |
|
|
|
D |
|
45 |
|
|
|
|
Уровни развития дефектов модулей движения по параметру ЭРА представлены в табл. 2
Таблица 2
Классификация технического состояния высоковольтных модулей по ЭРА
Техническое состояние |
Норма (Н) |
Норма с отклонениями (НСО) |
Норма со значительными отклонениями (НСЗО) |
Ухудшенное (У) |
|
|
Виды дефектов |
Коронная активность в статорной обмотке. |
Появление признаков явления |
Явление фиксируется устойчиво |
Имеется динамика развития |
Переход в предельное состояние |
|
Частичные разряды в корпусной изоляции разряды в кабельной линии. |
Появление признаков явления |
Явление фиксируется устойчиво |
Имеется динамика развития |
Переход в предельное состояние |
|
|
Искрения в контактах в районе клеммной коробки |
Появление признаков явления |
Явление фиксируется устойчиво |
Имеется динамика развития |
Переход в предельное состояние |
|
|
Пазовый разряд в обмотке статора |
|
Появление признаков явления |
Явление фиксируется устойчиво |
Имеется динамика развития |
|
|
Разряды в обмотке ротора. |
|
Появление признаков явления |
Явление фиксируется устойчиво |
Имеется динамика развития |
|
|
|
Искровые разряды в активной стали. |
|
|
Появление признаков явления |
Явление фиксируется устойчиво |
Данные табл. 1 и 2 являются исходными данными для формализации нечеткой модели классификации технического состояния высоковольтного мехатронного модуля.
Задачей диагностики является определение технического состояния объекта по наблюдаемым проявлениям дефектов, следовательно, входными данными модели являются виды дефектов, а выходами – искомое состояние объекта.
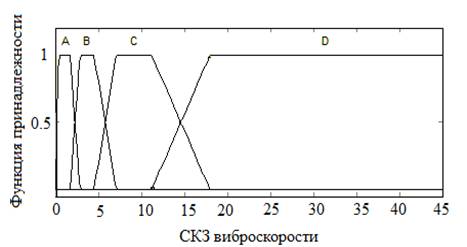
Согласно табл. 1, по результатам измерения СКЗ виброскорости, модуль движения, принадлежащий одному из четырех классов может находиться в зоне А, В, С или D[7].Пример входа нечеткой модели классификации для двигателя третьего класса представлен на рис. 1,а. Функции принадлежности имеют трапециевидную форму и соответствуют зонам вибрации из табл. 1
![]()
![]()
![]()
![]()
а)
б)
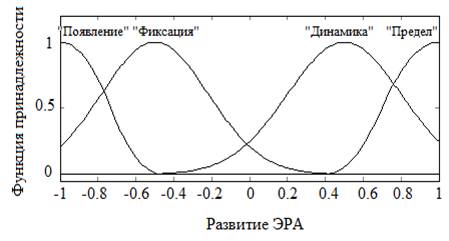
Рис.1. Входы нечеткой модели классификации по параметру СКЗ виброскорости (а) и ЭРА (б)
Согласно табл. 2, по результатам измерения параметра ЭРА можно выявить шесть неисправностей. Развитие дефектов модуля движения проходит следующие стадии: появление признаков явления; явление фиксируется устойчиво; имеется динамика развития; переход в предельное состояние. Исходя из этого, в качестве первых шести входов нечеткой модели классификации технического состояния, задаются неисправности, выявляемые по ЭРА с четырьмя функциями принадлежности, характеризующими стадии развития дефекта (рис.1,б). Первые две стадии развития дефекта позволяют дальнейшую эксплуатацию объекта без ограничений, две другие требуют пристального внимание и, возможно, останова для ремонта. Для наглядного отображения данного факта, стадии развития ЭРА задаются на интервале [-1 1]. Функции принадлежности «Появление» и «Фиксация» задаются на интервале [-1 0). Функции принадлежности «Динамика» и «Предел» задаются на интервале [0 1].
На вход нечеткой логической системы подается множество неисправностей объекта ![]() , где Y1 – «СКЗ виброскорости электродвигателя».Y2 – «Коронная активность в статорной обмотке»; Y3 – «Частичные разряды в корпусной изоляции разряды в кабельной линии»; Y4 - «Искрения в контактах в районе клеммной коробки»; Y5 - «Пазовый разряд в обмотке статора»; Y6 - «Искровые разряды в активной стали»; Y7 – «Разряды в обмотке ротора».
, где Y1 – «СКЗ виброскорости электродвигателя».Y2 – «Коронная активность в статорной обмотке»; Y3 – «Частичные разряды в корпусной изоляции разряды в кабельной линии»; Y4 - «Искрения в контактах в районе клеммной коробки»; Y5 - «Пазовый разряд в обмотке статора»; Y6 - «Искровые разряды в активной стали»; Y7 – «Разряды в обмотке ротора».
Согласно [8, 9], дефекты высоковольтного мехатронного модуля имеют следующую классификацию: «Норма » - отсутствие явного дефекта; «Норма с отклонениями (НСО)» - малозначительный дефект; «Нора со значительными отклонениями (НСЗО)» - значительный дефект; «Ухудшенное» - критический дефект; «Предаварийное» - предельное состояние.
Для задания выхода ![]() – «Состояние» нечеткой модели классификации задаются указанные пять видов состояния (рис. 2).
– «Состояние» нечеткой модели классификации задаются указанные пять видов состояния (рис. 2).
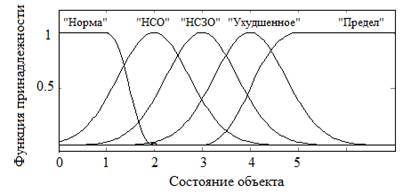
Рис. 2. Функции принадлежности выходной переменной «Состояние» нечеткой модели классификации технического состояния
Таким образом, моделируемая нечеткая логическая система классификации технического состояния высоковольтного мехатронного модуля имеет вид, представленный на рис 3.
Рис. 3 Структура нечеткой логической системы классификации технического состояния высоковольтного мехатронного модуля
Итоговый диагноз по результатам комплексного обследования определяется в соответствии со следующим: если ряд применяемых методов показывает на наличие начальной стадии развивающегося дефекта (оценка - "НСО"), то итоговую оценку технического состояния производить по шкале оценок на ступень выше (оценка - "НСЗО") и т.д; если все используемые методы дают оценку "НСЗО", то итоговая оценка состояния - "Ухудшенное" (РД ЭО-0187-00).
Исходя из этих требований, нечеткая база знаний будет иметь следующий вид:
R1: если Х1 есть «Появление» и Х2 есть «Появление»…и Х6 есть «Появление», то «НСО»;
R2: если Х1 есть «Фиксация» и Х2 есть «Фиксация»…и Х6 есть «Фиксация», то «НСЗО»;
Rз: если Х1 есть «Динамика» и Х2 есть «Динамика»...и Х6 есть «Динамика», то «Ухудшенное»;
R4: если Х1 есть «Предел» или Х2 есть «Предел»…или Х6 есть «Предел», то «Предаварийное»;
R5: если Х1 есть «Появление» или Х2 есть «Появление»… или Х6 есть «Появление», то «Норма»;
R6: если Х1 есть «Фиксация» или Х2 есть «Фиксация»…или Х6 есть «Фиксация», то «Норма с отклонениями»;
R7: если Х1 есть «Динамика» или Х2 есть «Динамика»...или Х6 есть «Динамика», то «Норма со значительными отклонениями»;
R8: если Х1 есть «Предел» или Х2 есть «Предел»…или Х6 есть «Предел», то «Ухудшенное»
Для преобразования четких входных значений в четкие выходные используется n – входной алгоритм нечеткого логического вывода Mamdani[10].
Процедура получения логического вывода следующая:
- Предполагается, что входные переменные приняли некоторые конкретные (четкие) значения – Y10, Y20 ,Y30, Y40, Y50, Y60, Y70,по которымнаходятся степени истинности
 для предпосылок каждого из приведенных правил и уровни «отсекания»
для предпосылок каждого из приведенных правил и уровни «отсекания»  ,
,  функций принадлежности для предпосылок каждого из правил с использованием операций минимум («
функций принадлежности для предпосылок каждого из правил с использованием операций минимум (« »):
»):

Затем находятся «усеченные» функции принадлежности ![]() :
:
- 2.Производится объединение функций, усеченных на предыдущем этапе логического вывода с использованием операции max(«
 »), в результате чего получается комбинированное нечеткое подмножество, описываемое функцией принадлежности
»), в результате чего получается комбинированное нечеткое подмножество, описываемое функцией принадлежности  и соответствующее логическому выводу для выходной переменной А:
и соответствующее логическому выводу для выходной переменной А:
![]() .
.
- 3.Нахождение четкого значения выходной переменной определяется как центр тяжести функции принадлежности
 :
:
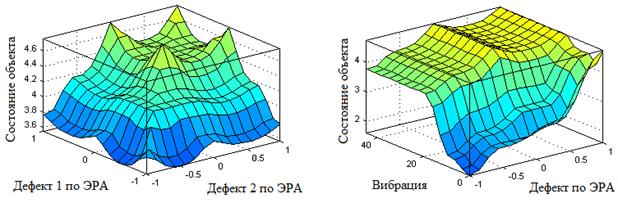
В результате компьютерного моделирования полученной нечеткой модели диагностирования получены поверхность отклика, представленные на рис. 4 и графики зависимостей состояния объекта от уровня развития неисправностей (рис.5).
а) б)
Рис. 4. Поверхности отклика нечеткой модели классификации технического состояния высоковольтного модуля движения:
а) при двух дефектах по ЭРА; б) при дефекте по ЭРА и СКЗ виброскорости
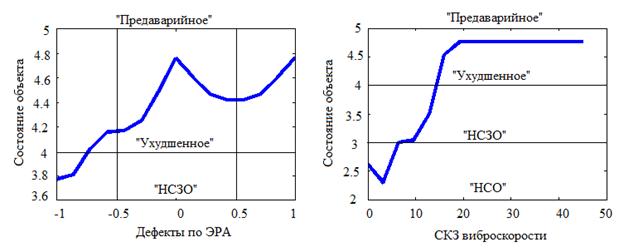
а) б)
Рис. 5. Графики зависимостей состояния объекта от уровня развития ЭРА (а) и СКЗ виброскорости (б)
Для исследования двигателя с применением данной модели, необходимо на вход подать относительные значения развития дефектов, выявляемых по ЭРА и абсолютное значение СКЗ виброскорости. Уровню развития «Появление» соответствует значение входа «-1», «Фиксация» - «-0.5», «Появление» - «0.5», «Предел» - «1». На выходе будет получен номер класса технического состояния от 1 до 5. При получении дробного значения состояния, необходимо произвести округление, согласно правил математики.
Получены нечеткая модель и метод классификации технического состояния высоковольтного мехатронного модуля, позволяющие, по результатам измерения параметров электроразрядной активности и среднеквадратического значения виброскорости определить техническое состояние объекта, отнеся его к одному из пяти классов состояний. Приведенный метод отличается совместным применением электрического метода контроля электроразрядной активности и неэлектрического метода вибрационной диагностики, что позволяет оценить все возможные виды дефектов высоковольтных модулей движения и существенно повысить качество диагноза.
Литература:
-
Синельщиков П.В., Новожилов А.С. Использование непрерывного вейвлет преобразования для диагностирования электроприводной арматуры [Электронный ресурс] // «Инженерный вестник Дона», 2009, №1 – Режим доступа: http://ivdon.ru/magazine/archive/n1y2009/109 (доступ свободный) – Загл. с экрана. – Яз. рус.
Чернов А.В., Пугачёва О.Ю.,.Абидова Е.А. Обработка диагностической информации при оценке технического состояния электроприводной арматуры АЭС арматуры [Электронный ресурс] // «Инженерный вестник Дона», 2011, №3 – Режим доступа http://ivdon.ru/magazine/archive/n3y2011/499 (доступ свободный) – Загл. с экрана. – Яз. рус.
Аксенов Ю.П., Завидей В.И., Мухортов А.В., Ярошенко И.В., Юрин А.В., Дементьев В.Н., Джикидзе В.В. Ремонт на основе локации разрядных явлений в цепях питания ротора на рабочем напряжении и при испытаниях [Текст]// «Приборостроение и средства автоматизации». - №5. – 2005. – С. 15-25
Y.P. Aksenov, G.Noe, I.Arces. Maintenance’s Experience of “Double Coordinates Locations Technologies” for turbine generator is on-line Sparking and PD-site location [Text] // CWIEME-2003. – Germany, BerlIN, JUNE 17-19, 2003. – P. 18-34
Detlev W. Gross “Partial Discharge Measurement and Monitoring on Rotating Machines” [Text] // IEEE Int. Sym. On Elect. Insul, BostonMAUSA, April 7-10, 2002. – P. 33-41
Ярошенко И.В. Применение диагностики для определения объема ремонта турбогенераторов / Аксенов Ю.П., Талапов С.Б. [Текст] // Электро – 2009 - № 2 – С. 27-36
Генкин М.Д., Соколова А.Г. Виброакустическая диагностика машин и механизмов [Текст]// М.: Машиностроение. - 1987. - 288 с.
Римов А.А. Методические аспекты оценки надёжности и технического использования теплоэнергетического оборудования ТЭС [Текст] // «Электрические станции». - 2010. - № 3. – C. 3 - 15.
Городов В.В., Лашицкий А.П. Новые средства контроля и диагностики щеточно-контактного аппарата мощных электрических машин [Текст] // М.: Энергетик, 2003. - № 8. - С. 16- 18
Круглова Т.Н. Глебов Н.А. Диагностирование и прогнозирование технического состояния мехатронных модулей технологического оборудования [Текст]: Монография. – Новочеркасск, 2011. – 119 с.