Исследование параметров осесимметричного изгибного пьезоэлектрического преобразо-вателя при различных граничных условиях
Аннотация
Оптимизирована конструкция осесимметричного изгибного пьезоэлектрического преобразователя при различных граничных условиях. В результате расчетов методом конечных элементов получен наилучший вариант крепления конструкции. Такой вид крепления позволяет уменьшить вибрационную чувствительность изгибного преобразователя. Критериями оптимизации служили: собственные частоты, эффективный коэффициент электромеханической связи, емкость, акустическая и вибрационная чувствительности, вибрационный эквивалент. Результаты моделирования согласуются с результатами классической теории.
Ключевые слова: осесимметричный изгибный пьезоэлектрический преобразователь, метод конечных элементов, граничные условия, вибрационная чувствительность, вибрационный эквивалент.
В настоящее время, с точки зрения теории, широко изучена конструкция круглой пластины при защемленном и опертом положении [1]. Однако такие теоретические исследования, в полной мере, проведены только для одной точки крепления, что на практике не всегда возможно. Следовательно, необходим более широкий круг исследований такой конструкции в зависимости от точки ее крепления.
Целью настоящей работы является оптимизация конструкции изгибного пьезоэлектрического преобразователя в зависимости от различных точек крепления, при защемленном и опертом положении. Оптимизируются следующие параметры преобразователя: емкость, частоты резонанса и антирезонанса, эффективный коэффициент электромеханической связи, чувствительность к акустическому и вибрационному воздействию, виброэквивалент. Цель достигается за счет анализа конструкции с помощью численных методов теории упругости как единого пространственного электро-упругого тела. Для моделирования осесимметричного изгибного пьезоэлектрического преобразователя используется метод конечных элементов (МКЭ). Достаточно полное и последовательное изложение МКЭ представлено в [2], а сам метод наиболее успешно реализован в программном пакете конечно-элементного моделирования ANSYS.
Рассмотрим конструкцию исследуемого преобразователя (Рис. 1 а). Преобразователь представляет собой двухслойную круглую пластину с параллельным включением электродов. В качестве материала выступает керамика ЦТС-83Г, параметры данного материала представлены в [3]. Электроды покрывают все горизонтальные поверхности преобразователя, в соответствии с рис. 1 а.
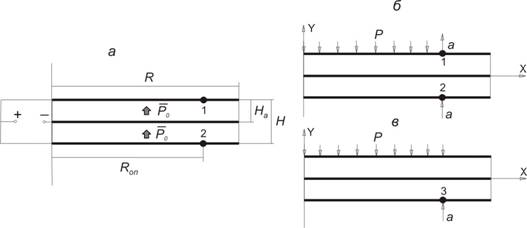
Рис. 1. Меридиональное сечение пьезоэлектрического изгибного преобразователя.
Керамика поляризована по продольной оси преобразователя, об этом говорит направление вектора остаточной поляризованности P0 (Рис. 1 а). В математической модели используется конечный элемент PLANE223, который имеет следующий набор степеней свободы: узловые смещения, температура и электрический потенциал.
Граничные условия формулируются в следующем виде:
Механические граничные условия:
1. Высота Н = 2 мм, На = 1 мм, радиус R = 15 мм – const (объем фиксирован);
2. Значение Rоп зависит от положения точек крепления 1, 2, 3 (рис. 1 а, б, в).
3. Преобразователь защемлен по контуру (рис. 1 б), в точках 1 и 2ξx =ξy= 0 (степени свободы точек 1 и 2 по оси OXY ограничены);
4. Преобразователь оперт по контуру (рис. 1 в), в точке 3ξy = 0,ξx ‡ 0 (степени свободы точки 3 ограничены в отношении оси OY, по оси OX точка 3 совершает перемещения);
5. В области Rоп на преобразователь действует давление P (рис. 1 а, б, в).
6. В точки крепления 1, 2, 3 действует виброускорение a (рис. 1 б, в).
Электрические граничные условия:
1. Условие короткого замыкания (частота резонанса, чувствительность по заряду);
2. Условие холостого хода (частота антирезонанса, чувствительность по напряжению).
В ходе исследования рассматривались зависимости параметров преобразователя: емкость, частоты резонанса и антирезонанса, чувствительность к акустическому давлению и вибрации, виброэквивалент, при изменении положения точек фиксации 1, 2, 3 (см. рис. 1 б, в), в условии защемленного и опертого контура преобразователя.
Результаты представленные на рис. 2 показывают, что вид крепления влияет на характеристики преобразователя, в особенности радикально меняется зависимость эффективного коэффициента электромеханической связи от соотношения Rоп/R (рис. 2 в), который вычислялся с помощью частот резонанса и антирезонанса.
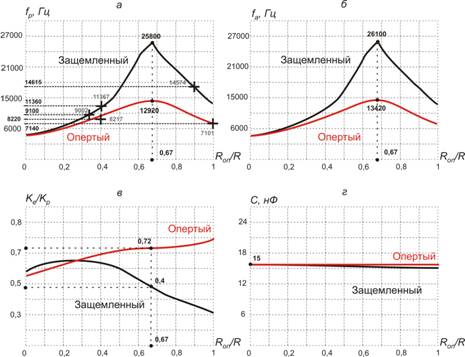
Рис.2. Графики зависимости параметров преобразователя от Rоп/R:
а) частота резонанса; б) частота антирезонанса; в) эффективный коэффициент электромеханической связи; г) емкость.
Значительное изменение эффективного коэффициента электромеханической связи вызвано разным распределением механических напряжений, что вызвано видом крепления преобразователя. Величина Rоп/R менялась в интервале от 0 до 1. В случае защемленного преобразователя максимальные напряжения будут концентрироваться в точках крепления 1 и 2 (рис. 1 б), а при опертом по контуру преобразователе, максимальные механические напряжения будут распределяться вдоль всего радиуса R преобразователя (рис. 1 в). Эффективный коэффициент электромеханической связи нормирован по величине планарного коэффициента связи Kp. Более подробные сведения о данном коэффициенте представлены в [4].
Частоты резонанса и антирезонанса (рис.2 а, б) имеют максимальное значение в точке, когда отношение Rоп/R составляет 0,67. Вследствие такого отношения Rоп/R достигается оптимальное значение частоты резонанса Fp и антирезонанса Fa (рис. 2 а, б), при которых нормированный эффективный коэффициент электромеханической связи принимает более высокое значение в случае опертого преобразователя, чем при защемлении по контуру.
Результаты полученных частот резонанса fp проверены на основе классической теории, для опертого преобразователя (1) и защемленного (2): 
где a – радиус;ρ– плотность; ωi – круговая собственная частота, при i узловой окружности, D – изгибная жесткость, t – толщина. Более подробно о расчете собственных частот для различных видов креплений представлено в [1]. Полученные теоретические значения для частот резонанса fp представленные в виде крестиков на рис. 2 а. Расхождение практических и теоретических, составило не более 2%, что является допустимым результатом. Поскольку достигнута достаточная сходимость практических и теоретических результатов для частот резонанса fp, следовательно, можно говорить о достаточной сходимости всех расчетов.
Емкость преобразователя, при каждом из крепления рассчитывалась на частоте 100 Гц (рис 2 г). Поскольку емкость С в случае опертого и защемленного положения преобразователя является практически постоянной величиной, следовательно, нет и оптимального значения для данного параметра.
Одними из основных характеристик пьезоэлектрического преобразователя является его чувствительность к информационному параметру. В качестве информационного параметра принято акустическое давление и вибрация. Влияние конкретного вида крепления преобразователя на чувствительность приведены на рис. 3. Чувствительность по заряду и по напряжению, при акустическом и вибрационном воздействии рассчитывалась на частоте 100 Гц.

Рис. 3. Графики зависимости параметров преобразователя от Rоп/R:
Чувствительность по заряду (а, в) – по напряжению (б, г).
Из рис. 3 видно, что конкретный вид крепления по-разному влияет на чувствительность в целом. Более эффективно вид крепления влияет на акустическую чувствительность. Такой эффект достигается из-за самого вида крепления, поскольку при опертом преобразователе одна точка крепления, а при защемленном точек крепления две (рис. 1 б, в). Оптимальным значением акустической чувствительности является результат при опертом положении преобразователя. Оптимум для вибрационной чувствительности достигается в минимальном значении в точке 0,756 (рис. 3 б, в).
Исследуемые способы крепления изгибного пьезоэлектрического преобразователя влияют на виброэквивалент преобразователя. Под данным термином принято понимать отношение чувствительностей. В исследовании использовалась следующая формула для определения виброэквивалента:![]()
где Kpq – акустическая чувствительность по заряду; Kaq – вибрационная чувствительность по заряду.
Зависимость виброэквивалента от соотношения Rоп/R для двух видов крепления представлена на рис. 4.
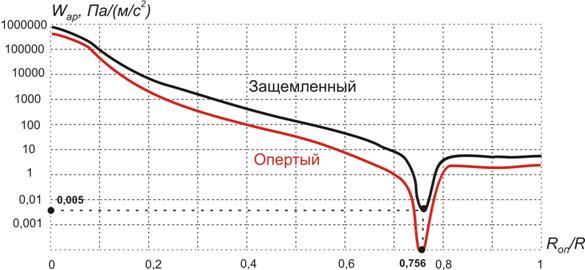
Рис. 4. Зависимость виброэквивалента отRоп/R .
Как видно из представленного рисунка, виброэквивалент принимает наименьшее значение при соотношении Rоп/R = 0,756. Данный результат оптимален, поскольку при закреплении изгибного пьезоэлектрического преобразователя в данной точке, вибрационная чувствительность конструкции сводится к минимальному значению, как в случае опертого преобразователя (рис. 4).
Таким образом, кратко результаты настоящей работы могут быть сформированы следующим образом:
1. С использованием метода конечных элементов исследована математическая модель изгибного пьезоэлектрического преобразователя, которая хорошо согласуется с классической теорией.
2. В рамках математической модели получены зависимости емкости, частот резонанса и антирезонанса, эффективного коэффициента электромеханической связи, чувствительности, виброэквивалента изгибного пьезоэлектрического преобразователя для широкого круга значений величины Rоп/R.
3. Оптимальное значение параметров преобразователя достигается при различных граничных условиях.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Аронов Б.С. Электромеханические преобразователи из пьезоэлектрической керамики. Ленинград: Энергоатомиздат, 1990. – 272с. 2. Наседкин А.В. Конечно-элементное моделирование преобразователей в ANSYS. Ростов-на-Дону, 2008. – 90с. 3. ОСТ 11 0444-87. Пьезокерамические материалы. Технические условия 4. Богуш М.В. Пьезоэлектрические датчики для экстремальных условий эксплуатации. Ростов-на-Дону: Изд-во ООО «ЦВВР», 2006. – 115с.