Адаптивное подавление артефактов движения при записи ЭКГ лошади
Аннотация
Дата поступления статьи: 12.09.2013В статье рассматриваются алгоритмы подавления помех, возникающих в сигнале ЭКГ за счет смещения электродов вследствие движения объекта. Предлагается использовать адаптивный фильтр, опорным сигналом которого служат данные трехосного акселерометра.
Ключевые слова: электрокардиограмма, адаптивная фильтрация, артефакты движения, электрофизиологический сигнал, алгоритм адаптации
05.11.17 - Приборы, системы и изделия медицинского назначения
05.13.01 - Системный анализ, управление и обработка информации (по отраслям)
При записи электрокардиограммы (ЭКГ) в движении крайне важно минимизировать влияние артефактов движения. Артефакты движения можно разделить на две группы: низкочастотные (до 2 Гц) и высокочастотные (начиная с 20 Гц).
Низкочастотные артефакты обусловлены неравномерностью контакта электрода с телом, изменением емкости кабель-тело, позиционные изменения положения электрической оси сердца при движении.
Высокочастотные артефакты движения чаще всего связаны с миографической помехой от интенсивно работающих мышц конечностей. Если в задачу динамического наблюдения ЭКГ входит отслеживание изменений ST сегмента, то актуальной становится задача нейтрализации НЧ артефактов движения. В качестве модельного сигнала в работе использовалась ЭКГ человека с частотой сердечных сокращений 135 уд./мин. и частотой шагов 1.5 Гц и показан на рис. 1.

Рис. 1. - ЭКГ с НЧ артефактами движения
Борьба с артефактами движения невозможна с помощью полосовой фильтрации, так как информативные сигналы смещения ST сегмента (0.05-1 Гц) лежат в полосе частот НЧ артефактов движения.
В традиционных полосовых методах фильтрации входные сигналы обрабатываются фильтрами с постоянными параметрами. Фильтры при этом могут иметь как конечную импульсную характеристику (КИХ), так и бесконечную импульсную характеристику (БИХ), но передаточная функция таких фильтров не зависит от параметров входных сигналов и их изменения во времени.
Адаптивные фильтры отличаются наличием связи параметров передаточной функции с параметрами входных или выходных сигналов а возможно и с параметрами их статистических соотношений, что позволяет фильтру самонастраиваться на оптимальную обработку сигналов [1]. Элементарный адаптивный фильтр содержит фильтр с переменными коэффициентами и блок адаптации, который на основании анализа входных, выходных и прочих данных вырабатывает сигнал управления коэффициентами фильтра. Адаптивные фильтры могут иметь также как КИХ, так и БИХ.
Наибольшее применение при разработке систем для адаптивной обработки сигналов находят два подхода: на основе схемы наименьших квадратов (СНК) и рекурсивной схемы наименьших квадратов (РСНК).
Основная область применения адаптивной фильтрации при обработке ЭФС– подавление нестационарных и стационарных помех и шумов, перекрывающихся по спектру со спектром ЭФС, или когда полоса помех неизвестна, переменна и не может быть задана априорно для расчета рассмотренных ранее фильтров с постоянными параметрами. Эффективное решение этих проблем возможно только адаптивными фильтрами.
Частотная характеристика адаптивных фильтров автоматически регулируется или модифицируется в соответствии с определенным критерием, позволяющем фильтру адаптироваться к изменениям характеристик входного сигнала. Рассмотрим наиболее распространенные схемы адаптивной фильтрации сигналов.
Блок-схема фильтра приведена на рис. 2.
Рис. 2. - Блок-схема адаптивного фильтра
Фильтр состоит из блока цифрового фильтра с регулируемыми коэффициентами и адаптивного алгоритма для настройки и изменения коэффициентов фильтра. На фильтр одновременно подаются входные сигналы y(k) и x(k). Сигнал y(k) содержит полезный сигнал s(k) и некоррелированный с ним сигнал артефакта g(k). Сигнал x(k) – это сигнал от инерциального датчика движения, коррелированный с g(k), который используется для формирования оценки сигнала.
В качестве алгоритма адаптации используется алгоритм последовательного спуска (Уидроу-Хопфа):
![]() ,
,
![]() .
.
После инициализации исходных коэффициентов фильтра в цикле выполняются следующие действия:
- Вычисляется оценка шума
- Вычисляется оценка сигнала
- Пересчитываются коэффициенты фильтра для следующего шага

Блок-схема алгоритма приведена на рисунке 3.
Рис. 3. - Алгоритм адаптации методом наименьших квадратов
Рис. 4 - Структурная схема адаптивного фильтра артефактов движения
Алгоритм наименьших квадратов пересчитывает веса по следующим формулам:
![]()
![]()
…
![]()
На практике точка максимальной оптимальности флюктуирует около теоретически возможной. Если входной сигнал нестационарный, то изменение статистик сигнала должно происходить достаточно медленно, чтобы коэффициенты фильтра успевали следить за этими изменениями.
В адаптивном фильтре очень важен правильный выбор параметра адаптации ![]() .
.
При малых значениях параметра адаптации фильтр не успевает адаптироваться за период стационарности помехи, при больших значениях параметра адаптации сначала появляются искажения полезного сигнала, а затем начинаются высокочастотные осцилляции и решение расходится. На рис. 5 и рис. 6 показан процесс адаптации фильтра при относительно больших параметрах адаптации, фильтр адаптируется за 1-4 секунды, но искажения ST сегмента при этом чрезмерно большие.
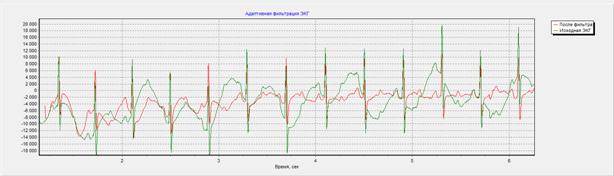
Рис. 5. - Адаптивный фильтр адаптировался за 4 секунды, ![]()
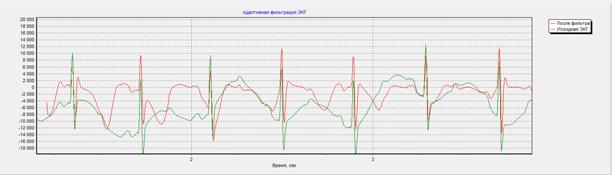
Рис. 6. - Адаптивный фильтр адаптировался за 1 секунду, ![]()
Наиболее качественная фильтрация показана на рисунке 7. Видно, что ST сегмент не искажен, при этом амплитуда артефактов движения доходит до 100% амплитуды ЭКГ.

Рис. 7. - Адаптивный фильтр с оптимальным ![]()
Структура фильтра представлена на рисунке 4, количество коэффициентов фильтра 4, задержки (в квантах) – 200, 300, 400.
Далее показан фрагмент программы на языке Pascal, реализующей данный адаптивный фильтр:
w1:=0; w2:=0; w3:=0; w4:=0;mu:=1e-11; eps:=0;
for i:=401 to 60000 do
begin
YY:=ACS[i]*w1+ACS[i-200]*w2+ACS[i-300]*w3+ACS[i-400]*w4;
w1:=w1+2*mu*eps*ACS[i];
w2:=w2+2*mu*eps*ACS[i-200];
w3:=w3+2*mu*eps*ACS[i-300];
w4:=w4+2*mu*eps*ACS[i-400];
eps:= Ecg1[i]-YY;
end;
На каждый отсчет сигнала требуется 12 умножений и 7 сложений. На рис. 8 показан совершенно тяжелый случай для обработки, когда амплитуда артефактов значительно превышает полезный сигнал. Видно, что адаптивный фильтр прекрасно справился с этой задачей.
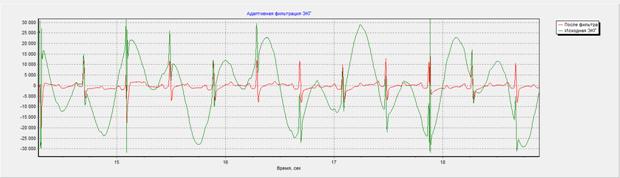
Рис. 8. - Работа адаптивного фильтра при амплитуде артефактов движения в 2-2.5 раз больше амплитуды ЭКГ
Проблемы могут возникать при единичных локальных нестационарностях артефакта движения. Фильтр не успевает адаптироваться за время длительности нестационарного участка, как видно на рис. 9.
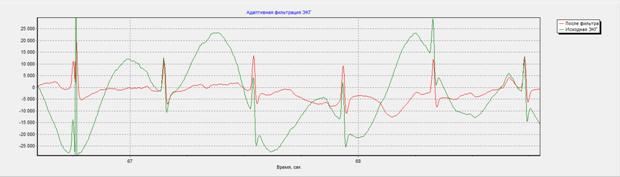
Рис. 9. - Работа адаптивного фильтра при большой локальной нестационарности артефакта движения
Выводы:
- Адаптивный фильтр хорошо фильтрует артефакты движения, не искажая ЭКГ при стационарной или медленно меняющейся помехе.
- Фильтр может эффективно работать даже при артефактах, превышающих амплитуду полезного сигнала
- Для правильной работы фильтра необходимо тщательно подобрать параметр адаптации
- Для эффективной работы фильтра достаточно 4 адаптируемых коэффициентов
Результаты исследований, изложенные в данной статье получены в рамках реализации ГБ ФНИР № 43.01.51 по теме: «Исследование маркеров информационной перегруженности человека при решении задачи непрерывного управления техническим объектом». Исследования проводились в ФГАОУ ВПО ЮФУ.
Литература:
- Адаптивные фильтры [Текст] / Под ред. К.Ф.Н.Коуэна и П.М.Гранта. – М.: Мир, 1988, 392 с.
- Синютин С.А. Анализ RR интервального ряда водителя в условиях сильных помех с помощью Wavelet преобразования [Электронный ресурс] // «Инженерный вестник Дона», 2012, №3. – Режим доступа: http://ivdon.ru/magazine/archive/n3y2012/919 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Тарасова И.А, Леонова А.В., Синютин С.А. Алгоритмы фильтрации сигналов биоэлектрической природы [Электронный ресурс] // «Инженерный вестник Дона», 2012, №4 (часть 2). – Режим доступа: http://ivdon.ru/magazine/archive/n4p2y2012/1481 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Синютин С.А., Сахаров В.Л. Определение мощности, развиваемой человеком при ходьбе по измерению ускорений [Текст] // Рассеяние электромагнитных волн. Межвед.сб.науч.-техн. статей. – Вып.16/ Под ред.Ю.В.Юханова. – Таганрог: ТТИ ЮФУ. – 229с.
- Синютин С.А. Теория и конструкция полиграфа для регистрации мощности, развиваемой человеком при ходьбе [Текст]: тез.докл. III Международной науч.-практ. конф. (1 – 4 октября 2009, г. Ростов-на-Дону) / г. Ростов-на-Дону. – 2009. – 277 с.
- Семенистая Е.С., Леонова А.В. Экспериментальное исследование зависимости времени пульсовой волны от систолического артериального давления [Электронный ресурс] // «Актуальные вопросы исследования общественных и технических систем». Материалы Всероссийской научной конференции, часть 2. – Таганрог: Изд-во ТТИ ЮФУ, 2011. – Режим доступа: http://fre.tti.sfedu.ru/ru/conferences/132-aviots.html – Загл. с экрана / – Яз. рус.
- Леонова А.В., Зиновкин П.К., Болдырев Е.Б. Аппаратно-программный комплекс регистрации нагрузки для функциональной диагностики Электронный ресурс] // «Инженерный вестник Дона», 2012, №4 (часть 1). – Режим доступа: http://ivdon.ru/ magazine/archive/n4p1y2012/1130 (доступ свободный) – Загл. с экрана. – Яз. рус.
- Glentis G.O., Berberidis K., Theodoridis S. Efficient Least Squares Adaptive Algorithms for FIR Transversal Filtering [Текст] // IEEE Signal Processing Magazine, 1999.— V. 16.—N. 4.— P. 13–41.
- Haykin S. Adaptive Filter Theory [Текст]:4th edition. Prentice Hall, 2002.— 936 p. ISBN 0-13-048434-2.
- Farhang-Boroujeny B. Adaptive Filters. Theory and Applications [Текст] // John Wiley & Sons ISBN: 0471983373.